歡迎進入東莞市諾元電機設備有限公司官網!公司主營:無刷繞線機,電機繞線機,馬達繞線機,定子繞線機,飛叉繞線機,高速繞線機等!
諾元視頻號


0769-81551289
150-1531-7403(微信同號)
諾元視頻號
0769-81551289
150-1531-7403(微信同號)
隨著高科技不斷發展,無人機航模技術已經相對成熟,越來越多的朋友喜歡上了它們,在我們日常生活中見到較多的當屬多旋翼無人機,旋翼無人機的構成分為4個系統,分別是動力系統、飛控系統、視頻系統、遙控系統等,這里我們主要說一下動力系統-電機知識。

電機通常稱為馬達,可以將電能轉換為機械能并驅動螺旋槳旋轉,從而產生推力。微型無人機航模動力馬達常見有兩種:有刷馬達和無刷馬達。由于有刷馬達效率低下,已經逐漸被淘汰。有刷電動機和無刷電機在外觀上的主要區別是:當內部有刷旋轉時,有刷電動機稱為轉子,不向外旋轉的永磁體稱為定子,無刷電動機稱為定子,旋轉稱為定子,外部永磁體的旋轉稱為轉子。
無刷電機有許多技術指標,與無人機的動態特性相關的兩個是速度和功率。旋轉速度通常以kV表示。所謂的kV是指每伏特(V)可以達到的每分鐘空載速度。例如,使用kV1000電動機和11. 1V電池,電動機速度應為1000x11.1 = 11100。 也就是說,每分鐘11100轉。 即每增加1V,電動機的空載速度就會增加1000轉。

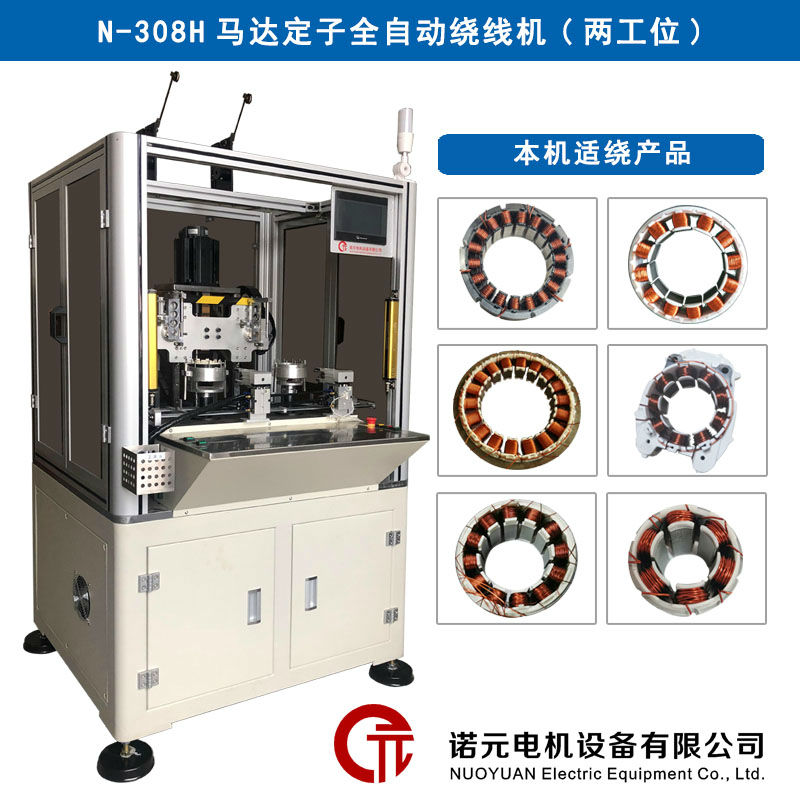
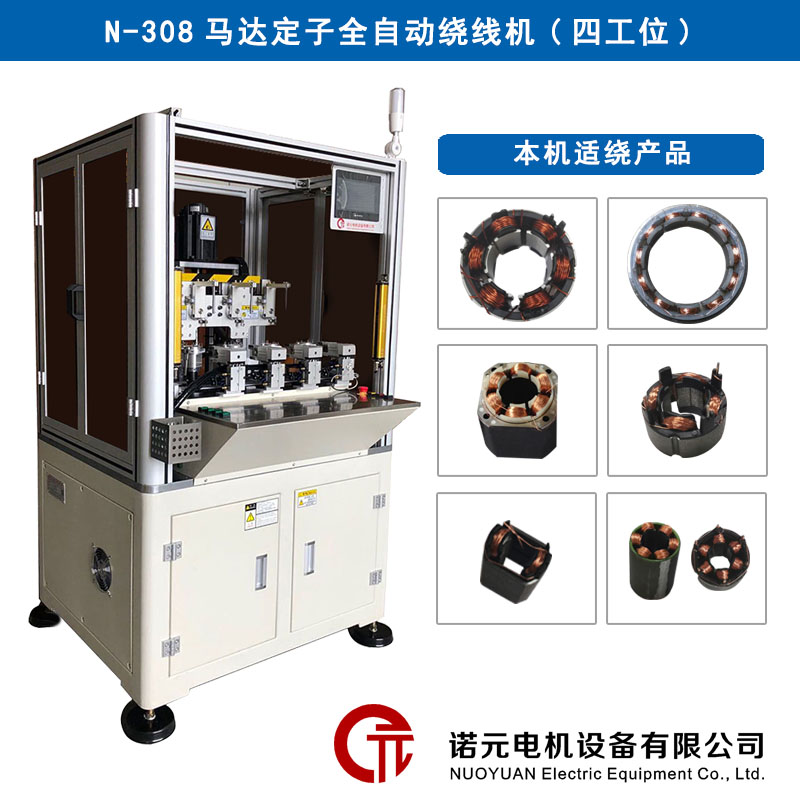
說到無人機電機,不得不提到繞線,繞線很重要,如果線圈繞得不好,將會影響整個動力系統的性能,當然,無人機質量也將大打折扣,現在大多使用全自動繞線機來進行繞線,廠家除了要選擇一家好的繞線機廠家外,還應對繞好的產品進行測試檢測,確保質量合格后,才用于后續的工序中。




 掃描二維碼,關注諾元公眾號
掃描二維碼,關注諾元公眾號